
 Russian
Russian English
English Chinese
Chinese
Лаборатория занимается автоматизацией измерений физического эксперимента, исследованием возможности контроля измерительной системой параметров объекта измерений, анализом и оптимизация структуры компьютерных контрольно-измерительных систем.
Используя возможности графической среды программирования NI LabVIEW, студенты могут программировать ПЛИС и разрабатывать системы реального времени, что позволяет им быстро выполнять свои проекты и предоставляет гибкость для создания прототипов.

Студенты в ходе учебного процесса выполняют проектно-исследовательские работы, учувствуют в региональных, Всероссийских и международных конкурсах, соревнованиях, грантах.
По результатам работ выиграны гранты:
1. УМНИК «Механическая модульная конечность»

2. Грант президента РС (Я) «Бионическая модульная конечность»
3. Грант президента РС (Я) «Автоматизированная гидропонная ферма»
Призовые места в соревнованиях:
Всероссийское соревнование по робототехнике «Робофест 2014» - II место;
Всероссийское соревнование по робототехнике «Роботех миссия марс 2013» - II место;
Всероссийское
соревнование по робототехнике «Робофест 2015» - II место.

А также разрабатывают аппаратно-программные комплексы, методические пособия по спец курсам для студентов, учителей:
1. Мобильный комплекс MobiPano полнокупольной панорамной видеосъемки с интерактивным просмотром видео потока в реальном времени.

2. Многоканальная автоматизированная тензометрическая станция для мониторинга и определения напряженно-деформационного состояния строительных конструкций и их элементов на основе применения оборудования «PXI» фирмы National Instruments.

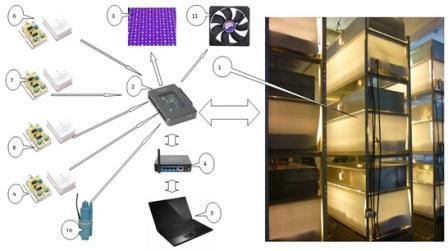
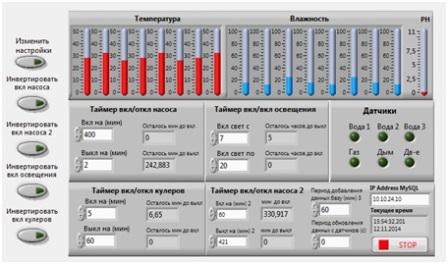
3. Автоматизированная система управления микроклиматом многоярусной гидропонной фермы круглогодичного выращивания растений в условиях севера.
4. Разработан UolanRobo динамический антропоморфный робот-аватар удаленного взаимодействия.

5. Система управления беспилотным летающим аппаратом AR Drone на базе ARM.
1. Учебное пособие "Эксперименты с роботом DaNI расширенная комплектация"
2. Учебное пособие "Эксперименты с модульным роботом NI RoCK для подготовки к международным соревнованиям по робототехнике First Robotics Competition".
Статьи в рецензируемых журналах:
1. 1. Иванов С.К., Филиппов С.М., Соловьева Н.М. Обработка идентификации объектов изображения на базе библиотеки LabVIEWMAQ [Текст]/ Иванов С.К., Филиппов С.М., Соловьева Н.М.//Материалы международного научно-образовательного форума СВФУ «Education, forward-II», г.Якутск, 23-28 июня 2014г. Выпуск 2. Издательский дом СВФУ, 2014.-с.175-178.
2. Филиппов С.М., Соловьева Н.М. Проектирование и разработка автономной мобильной системы с помощью среды LabVIEW [Текст]/ Филиппов С.М., Соловьева Н.М.// Материалы международного научно-образовательного форума СВФУ «Education, forward-II», г.Якутск, 23-28 июня 2014г. Выпуск 2. Издательский дом СВФУ, 2014.-с.402-404.
3. Филиппов С.М., Филиппов И.М., Соловьева Н.М. Организация проектной деятельности в образовательном учреждении на примере МБОУ СОШ №29 г. Якутска [Текст]/ Филиппов С.М., Филиппов И.М., Соловьева Н.М.// Материалы международного научно-образовательного форума СВФУ «Education, forward-II», г.Якутск, 23-28 июня 2014г. Выпуск 2. Издательский дом СВФУ, 2014.-с.404-406.
4. Филиппов И.М. Организация проектно-исследовательской деятельности учащихся на базе промышленной платы SbRIO [Текст]/ Филиппов И.М..//XIV Всероссийская научно-практическая конференция молодых ученых, аспирантов и студентов в г. Нерюнгри, с международным участием. Материалы конференции. – Нерюнгри: Издательство ТИ(ф) СВФУ, 2014.-с.197-199
5. Филиппов С.М. Организация проектно-исследовательской деятельности учащихся по робототехнике [Текст]/ Филиппов С.М..//XIV Всероссийская научно-практическая конференция молодых ученых, аспирантов и студентов в г. Нерюнгри, с международным участием. Материалы конференции. – Нерюнгри: Издательство ТИ(ф) СВФУ, 2014.-с.199-201.
6. Филиппов И.М., Иванов С.К., Соловьева Н.М., Васильев С.Е. Алгоритм обработки и определения объектов на изображении с последующим принятием решения на базе библиотеки LabVIEW IMAQ. [Текст]/ Филиппов И.М., Иванов С.К., Соловьева Н.М., Васильев С.Е.//Международного молодежного научного форума «ЛОМОНОСОВ-2014» / Отв. ред. А.И. Андреев, Е.А. Антипов. [Электронный ресурс] — М.: МАКС Пресс, 2014. — 1 электрон. опт. диск (CD-ROM)
7. Филиппов И.М. Применение LabVIEW для управления встраиваемого компьютера беспилотника Ar Drone на базе ARM [Текст]/ Филиппов И.М.// Инженерные и научные приложения на базе технологий National Instruments – 2013: Сборник трудов XII международной научно-практической конференции, Москва 6-7 декабря 2012 г. – М.: ДМК Пресс, 2012. – 504 с. с 355-356
8. Филиппов С.М. Организация проектно-исследовательской деятельности учащихся по робототехнике [Текст]/ Филиппов С.М..//XIV Всероссийская научно-практическая конференция молодых ученых, аспирантов и студентов в г. Нерюнгри, с международным участием. Материалы конференции. – Нерюнгри: Издательство ТИ(ф) СВФУ, 2014.-с.199-201
9. Филиппов И.М., Алексеев, Н.И., Соловьева Н.М., Алексеев А.А. Многофункциональная образовательная платформа [Текст]/ Филиппов И.М., Алексеев, Н.И., Соловьева Н.М., Алексеев А.А.// нженерные и научные приложения на базе технологий National Instruments – 2013: Сборник трудов XII международной научно-практической конференции, Москва 28-29 ноября 2013 г. – М.: ДМК Пресс, 2013. – 436 с. с 400-402
10. Васильев С.Е., Филиппов И.М., Дмитриев И.П., Огонеров К.Л. Дистанционно управляемый мобильный комплекс полнокупольной панорамной видеосъемки с интерактивным просмотром в реальном времени[Текст]/ Васильев С.Е. Филиппов И.М. Дмитриев И.П. Огонеров К.Л.// Инженерные и научные приложения на базе технологий National Instruments – 2013: Сборник трудов XII международной научно-практической конференции, Москва 28-29 ноября 2013 г. – М.: ДМК Пресс, 2013. – 436 с. с 126-129
11. Филиппов И.М., Алексеев А.И., Васильев С.Е., Алексеев А.А., Соловьева Н.М. Бионическая рука на базе myRIO [Текст]/ Филиппов И.М., Алексеев А.И., Васильев С.Е., Алексеев А.А., Соловьева Н.М. // Инженерные и научные приложения на базе технологий National Instruments – 2014: Сборник трудов XII международной научно-практической конференции, Москва 19-20 ноября 2014 г. – М.: ДМК Пресс, 2014. – 436 с. с 326-329